
. Introduction
In the mining industry, geospatial data form the basis for mining activities. Hence, in every part of mining operation ranging from initial exploration to ongoing mining works, mine surveyors are involved in data collection and documentation. These data are collected by adopting appropriate mine surveying techniques and instruments. Raeva et al. (2016) emphasised that obtaining up-to-date information about a quarry (open pit mining) requires frequent surveying of the constantly changing quarry shape and its elements such as bench height, slope, etc. and reliable estimation of the volume of excavated materials. Technological advancement in the area of aerial and satellite information technology have provided new and varied options for surveying and geoinformatics (Bahuguna et al., 2006).
Nowadays, difficult surface and underground mine surveying have been made simpler, and this has improved the services of mine surveyors and productivity of the mining sector. The advent of Global Positioning System (GPS), Light Detection and Ranging (LiDAR), radar technology as well as Unmanned Aircraft System (UAS) has contributed immensely towards making data acquisition in mine surveying much simpler. Gupta et al. (2013) described UAS as a system that comprises different components such as air vehicles and other associated equipment that fly autonomously without carrying human operator. UAS must be considered in a system context that consists of command, control and communication units as well as the personnel needed for controlling unmanned aircrafts.
Technological advancement has diversified the application of Unmanned Aerial Vehicle (UAV) from military application, which was its traditional usage at inception, into a data capturing tool for environmental monitoring, modelling and management among others (Ajayi et al., 2018). According to Ajeeth (2015), the use of small drone/UAV for aerial imaging, topographic mapping, monitoring and other applications has become more popular. On comparing UAV technology with conventional means of data acquisition or small aircraft, it is adjudged to be cost-effective amongst many other advantages (Ajayi and Palmer, 2020).
Several studies have suggested that UAV-based stockpile volume measurement is even more accurate than conventional stockpile volume evaluation methods (Martin, 2016; Propeller, 2018; Raeva et al., 2016; Zylka, 2014). Specifically, Raeva et al. (2016) identified that precise measurement can be made with Global Navigation Satellite System (GNSS) technologies, but it may be time consuming and expensive, while rapid and accurate mapping of large area and stockpile volumetric measurements can be conducted through UAV technology.
However, this method of stockpile volume evaluation has two major limitations, which are availability of limited and less-accurate interpolation algorithm for 3D modelling of hill terrain by most photogrammetric processing software and secondly, unpredictable change in the value of the volumes when re-measured. Many of the available photogrammetric processing software are provided with limited number of interpolation algorithms, which reduces or compromises the accuracy measure of the generated Digital Surface Model (DSM) required for volume estimation. Inverse Distance Weight (IDW) interpolation algorithm is often suggested for buildings, while Triangular Irregular Network (TIN) is suggested for flat terrain and stockpile (Pix4D Support, 2020). Meanwhile, Bater and Coops (2009) suggested that terrain representation by using linear, quantic, spline with tension, ANUDEM and natural neighbour interpolation algorithm provides better terrain representation and parameterisation than IDW. Additionally, a pixel-based algorithm for volume calculation in photogrammetric processing software requires marking of the base of the points of interest. Consequently, there is occurrence of change in the volume value whenever the base of the points of interest is re-marked for re-measuring and re-estimation of the volume, even when the quantity of the stockpile remains the same. This poses a major challenge on the reliability of estimated volumes and underscores the need to automate the volume estimation process.
The primary goal of this study is to develop a semi-automatic script-based MATLAB algorithm that can generate 3D surface and contour of the scene of interest and also estimate earthwork volume through a ‘robustified’ contour approach, such that it will resist the change of the value of estimated volumes when re-estimated. Thus, in this study, the feasibility of stockpile extraction from DSM was explored and an automated system for volume determination has been presented. To validate the robustness of the developed system, the volume estimated with the aid of a photogrammetric software (Pix4Dmapper) was used as the reference or standard, since the software is capable of estimating the error of computed volume with respect to elevation error.
. Literature Review
Different research efforts have been invested in the applications of UAV to civil and mining applications, most of which emphasise the potential of UAV as an alternative data acquisition source to conventional terrestrial approaches. Specifically, Rahman et al. (2017) deployed a UAV (DJI Phantom 3) to capture spatial data of water tanks for the purpose of estimating their volumes. The volumes of the tanks were estimated using two and four ground control points (GCPs), while the acquired images were processed with Agisoft Photoscan software. The volume estimated using large number of images and four GCPs indicated huge improvement as an error rate of 5% was achieved when the value was compared to the actual volume of the tank. The potential of UAV as a suitable alternative for volume estimation in a surveying process was demonstrated, but the used tool/software lacked automation and the process was time consuming, while the study also concluded that to achieve higher volume accuracy with UAV approach, there is need for the establishment of sufficient number of GCPs. Rahman et al. (2017) also posited that the application of UAV in surveying has increased and that it offers great potentials in numerous applications such as remote sensing, disaster monitoring, emergency search and rescue missions, atmospheric survey and others.
Yoo et al. (2017) presented a concise summary of the potential of UAV technology towards disaster waste management. Their work affirmed that in disaster waste management system, information about location and amount of disaster waste is very crucial. Previous studies suggested statistical model as a means of obtaining information on the extent of disaster waste after occurrence of a disaster Hirayama et al. (2009); Yoo et al. (2017). The major limitation to statistical model for locating and estimating disaster waste amount is the lack of estimated value of disaster waste at the site. Also, the model depends mainly on historical data about disaster waste. Hence, in Seoul, South Korea, a UAV was deployed over solid waste staging site for the acquisition of aerial images of the site. The image data obtained were processed with Pix4D in order to obtain points cloud of the site, which was later used in a newly developed Python-based algorithm for identification of location and estimation of amount of disaster waste. The data processed with this method were very critical in providing real-time information for disaster waste management with an observed relative error of 7.04%.
Raeva et al. (2016) discussed the significance of UAV photogrammetry over conventional surveying method (terrestrial GNSS) for some particular cases of mining and engineering applications. As the world is dynamic, there is need for presentation of new techniques and methods in many fields. For example, to effectively manage an open pit quarry, there is need for acquisition, processing and storage of a large amount of information which changes constantly with time. Furthermore, in order to outline the significance of UAV, a project was executed using both GNSS and UAV to measure the quarry located at the outskirt of Lukovit town in Bulgaria. GNSS receivers were used to measure major clay stockpile within the quarry as well as the entire quarry for visualisation of the quarry's topography. A total of seven GCPs were established for the purpose of the UAV flight mission. The GNSS data were processed with AutoCAD civil 3D, while Pix4D was used to process UAV-acquired data. According to Raeva et al. (2016), the promising potential of UAV application in mine engineering is enormous in terms of rapid data acquisition, generation of sufficient number of points for volume evaluation and the volume estimation accuracy of UAV with respect to GNSS which was estimated to be at an error rate of 1.1%. Stockpile volume estimation from GNSS data was found to be time consuming and less accurate since the accuracy of the measurement depends on the number of points measured, while with the UAV approach, large number of points (points cloud) can be obtained from the acquired overlapping images, which will yield more accurate result.
Nguyen et al. (2019) evaluated the accuracy of 3D mapping of a complex terrain open pit mine by using UAV technology. Four open pit mine sites in Vietnam were selected for the study, namely Nui Nho, Nui Dai, Long son and Luong son, with areas of 27, 70, 12 and 13 ha of land, respectively. A reconnaissance survey was conducted and GCP locations were selected with the aid of handheld GPS software (mapping v3.8) installed on Samsung A7 android mobile device. While automatic flight plan was made through Pix4D capture, survey of the quarries was carried out using DJI Phantom 4 pro quadcopter. GCPs were established with Leica Total station for accurate DSM production. Acquired aerial images were processed using Agisoft Photoscan v1.3, which enabled generation of DSM for volume evaluation purpose. For the cases of Nui Nho and Nui Dai, the estimated root mean square error (RMSE) for station coordinates are 10.3 cm in the horizontal direction and 13.4 cm in the vertical direction and 1.6 cm in the horizontal direction and 8.4 cm in the vertical direction, respectively. The cases of Long son and Luong son presented RMSE values of 2.6 cm in the horizontal direction and 5.3 cm in the vertical direction and 2.0 cm in the horizontal direction and 4.4 cm in the vertical direction, respectively. Nguyen et al. (2019) argued that one of the major factors that determine accuracy of DSM, UAV safety and efficiency of UAV mapping is the flight height; therefore, the considered flight height for the study ranged from 150 to 250 m based on the terrain of each site. From the analysis of the position coordinates for the four cases, it was also deduced that UAV is efficient for mapping small-sized open pit mine sites.
Mohammed and Abdulrahman (2020) assessed the performance of Digital Elevation Model (DEM) generated from UAV and GLObal Positioning System deployed in Real Time Kinematic mode (GPS-RTK) for earthwork volume computation. Traditional surveying was performed to obtain point data of Duhok Dam in the city of Duhok in Kurdistan, Iraq. Leica Viva GNSS GS10 (Base) and Leica Viva GNSS GS15 (Rover) were adopted for the acquisition of the GCP coordinates of about 11 points and to obtain data for traditional volume measurement. The GPS data were obtained across the crest of the dam including all characteristic points that made up the terrain model, such as the edge. AutoCAD civil 3D was used to process GPS data and to estimate the volume from the DEM generated from this data. For the UAV scenario, a rotary wing UAV (DJI Phantom 4 pro) was used to acquire aerial images of the study site, while the flight plan was designed using Pix4D capture, an autopilot application for aerial mapping. The UAV data were obtained at three different altitudes (25, 50 and 100 m) for accuracy check and the acquired images were processed using Agisoft Photoscan version 1.4.3. The volumes were measured with different reference surface levels ranging from 596 to 610 m (both GPS and UAV) and different flying heights (25, 50 and 100 m) for the case of UAV. From the comparison of the estimated values obtained from two methods, it was discovered that the volume estimated from the UAV method when flown at 25 m flying height yielded a more accurate result when compared to the volumes estimated from the UAV method when deployed a 50 and 100 m flying altitudes, and the GPS method. It was deduced that volume estimation from UAV-based DEM agreed with GPS-RTK by 99.74%, 99.76% and 99.86% for the flying heights 100, 50 and 25 m, respectively.
Akgul et al. (2018) investigated the most reliable and effective method for low-volume road planning. A fixed wing UAV (Trimble UX5) was used to acquire aerial images of the study area at an altitude of 200 m on 22 flight lines. A total of 48 GCPs were established with PentaxSMT-888 GNSS. In their study, two methods were used to acquire data of the study area (conventional terrestrial surveying with GNSS and UAV based method). NRTK-GNSS receiver and PentaxSMT-888 were used to obtain point coordinate of about 5478 points at different modes based on Turkey Continuously Operating Reference Station (CORS) network system. DEM was created from the acquired point data using the ‘Topo to Raster’ function of ArcGIS at 1-m grid resolution, while Agisoft Photoscan pro software was used to process the acquired aerial images. For the road design stage, three alternatives of alignment were considered (road I, II and III) using AutoCAD civil3D 2015 software, where cross sections were created at 20-m intervals along the road and 6-m intervals on the curves. The point density of the NRTK-GNSS observation was 35 points/ha, while UAV-based point density was 234,385 points/ha with an RMSE of 8.14 cm. Consequently, DEM resolution of UAV-based method was found to be higher than that of NRTK-GNSS method.
Argese et al. (2019) demonstrated the possibility of adopting average end area volume estimation method and new python-based algorithm as a procedure to automate earthwork volume computation using UAV approach and open source software. Two surveys were conducted at different epochs over a little stretch of about 300 m of ‘Superstrada pedemontana veneta’ roadwork site situated in northern Italy. A UAV called Calibri (by Ingegneria dei sistemi), equipped with Nikon Coolpix A camera and Topcon B110 L1/L2 GNSS receiver, was used for the survey. Data obtained by GNSS method were converted to Receiver Independent Exchange (RINEX) format for easy processing in RTKlib. Argese et al. (2019) stressed that in a construction site, all the measurements made should be referred to a local reference frame. Therefore, GNSS positions were transformed using Helmert transformation model to local reference frame using benchmarks of known global and local reference frame, from global absolute reference frame (WGS84) to local reference frame using a developed software module. UAV images acquired together with GCPs were processed in Micmac open source software, and to compute the volume, a python script was used to extract a subset of the whole point cloud that corresponds to an area included in two kilometric points. Two methods were used for the volume calculation, which are the common average end area method and the proposed python-based method. In the proposed method, volume was obtained by superimposing grid over a region, whereby for each cell, each included point height value was computed. From the result of the evaluated volume, it was found that the proposed method (IDW and average end area method) performed significantly better by reducing the mean error from 2.4% for the manual method to 0.8% for the proposed method and the error scattering from 1% for the manual method to 0.3% for the proposed method.
Dastgheibifard and Asnafi (2018) highlighted the potential application of UAVs in construction environment. A comprehensive overview of UAV and its most crucial application in construction industry were considered on the aspect of project progress control, damage assessment, surveying, safety monitoring and 3D modelling. On the aspect of project progress control, UAVs can be used majorly to assess the current as-built condition of the project and to identify the occurrence of disparities between as-built and as-planned progress. While reviewing the application of UAV in construction industry on the aspect of damage assessment, UAV was identified as a faster means of detecting damaged building after occurrence of any disaster such as earthquake, hurricane, etc. when compared to other remote-sensing approaches. Furthermore, Dastgheibifard and Asnafi (2018) opined that UAS in recent years has become steadily relevant for visual surveying and generation of 3D image of sites due to its ability to obtain high-resolution images that can be transformed into 3D surface or topographic map and for the computation of volume of earthwork as well as for portraying construction sites in a 3D form. Other areas include safety monitoring to ensure fatalities and accidents in construction sites, 3D modelling to generate quality as-built of the construction site as well as reducing discrepancies between as-built and construction phases.
. Materials and Methods
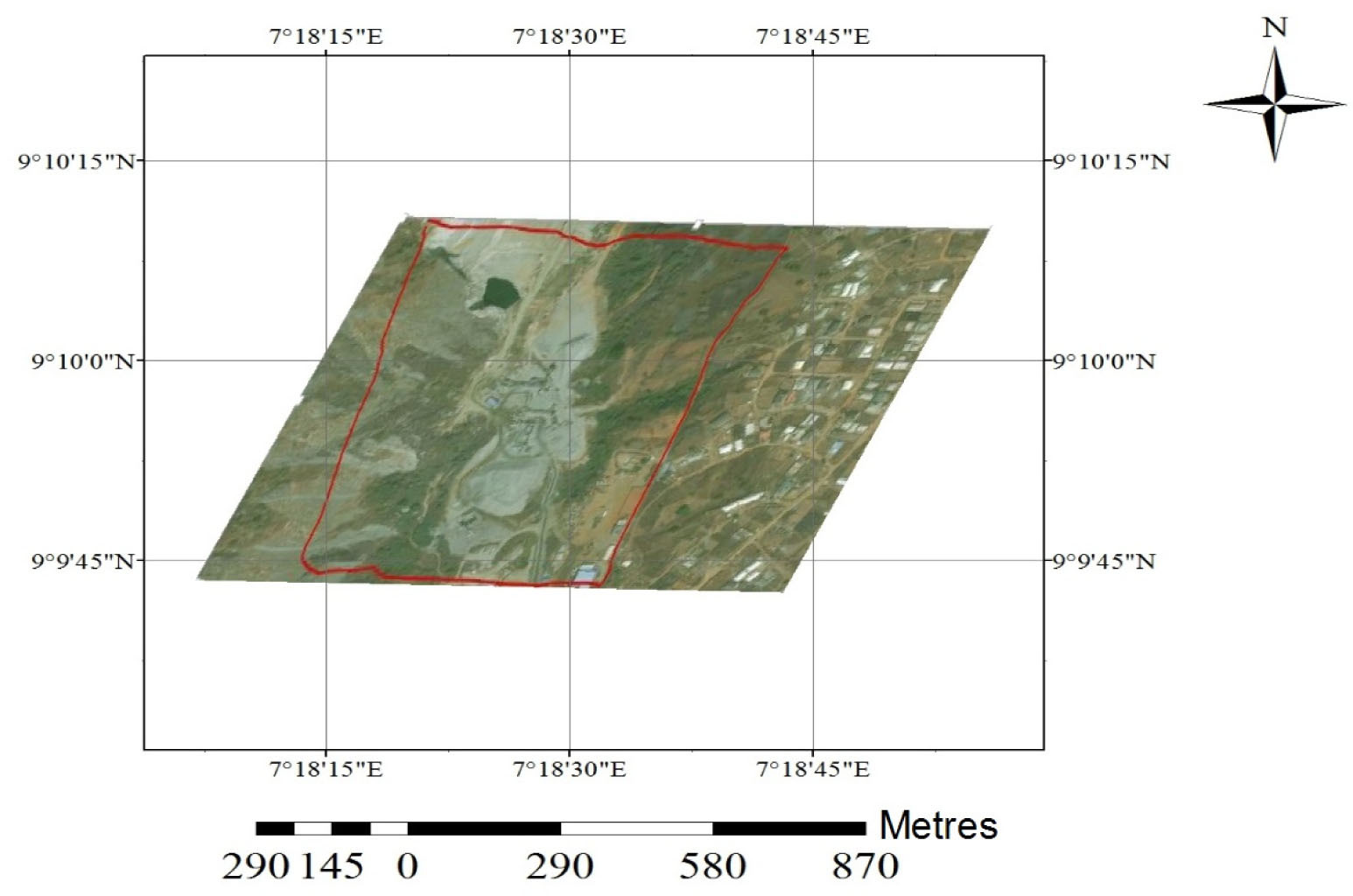
The Zeberced Quarry (Figure 1), which is the project site for this study, is located in the northern part of Kubwa (Abuja, Nigeria), a residential area in Bwari Local Council Development Area (LCDA) of Abuja. Kubwa is geographically located between latitudes 9°9’13″N to 9°10’10″N and longitudes 7°18’05″E to 7°19’51″E. It is one of the major suburbs of Nigeria's Federal Capital Territory.
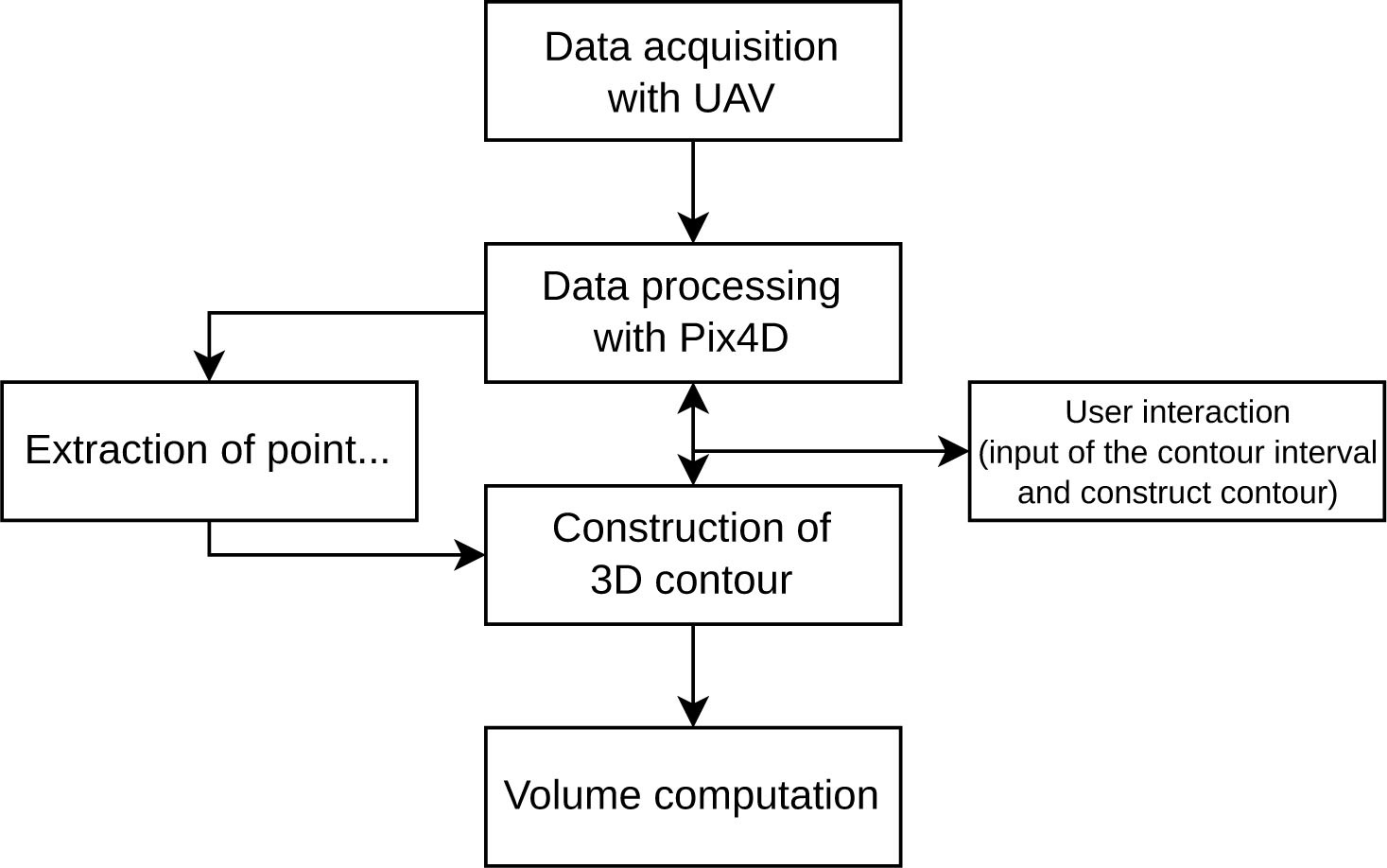
The key steps adopted in the development of UAV-based stockpile evaluation system are described in Figure 2. The first step involves acquisition of aerial photographs with DJI Phantom 4 quadcopter, which was used to generate orthophoto and points cloud required for the construction of 3D models of the scene. The images were acquired with overlapping percentages of 75% and 65% (forward and side, respectively) to ensure accurate generation of points cloud.
The DJI Phantom 4 is equipped with autonomous mode of flying for various scenarios such as the object tracking mode and the pre-defined path mode, and also with an obstacle avoidance sensor that ranges from 0.7 to 15 m. The technical parameters of the drone are presented in Table 1. Generally, DJI Phantom 4 drone consists of intelligent flight battery, gimbal, aircraft, remote controller and camera. The camera type of this drone is FC330_3. 6_4000x 3000 (RGB) with a focal length of 2285.714 pixels (3.61 mm). Also, it is equipped with GPS and GLONASS receiver, which makes it possible to obtain 3D coordinates of points cloud. Each exposure station GPS location is stored in Exchangeable Image File (EXIF) format, and this enables automatic georeferencing of the aerial images.
Table 1
Technical parameters of DJI Phantom 4 (Source: DJI (nd))
Dronedeploy application was used for flight planning and design of the flight plan (Figure 3). It is one of the most widely used software for aerial mapping project available for Windows, IOS, etc. Dronedeploy application allows the user to define flight altitude, shape of mapping area, camera, overlap percentage, flight speed, obstacle avoidance and flight direction. During the flight planning process, flight altitude of 150 m was selected due to the topography of the study area.
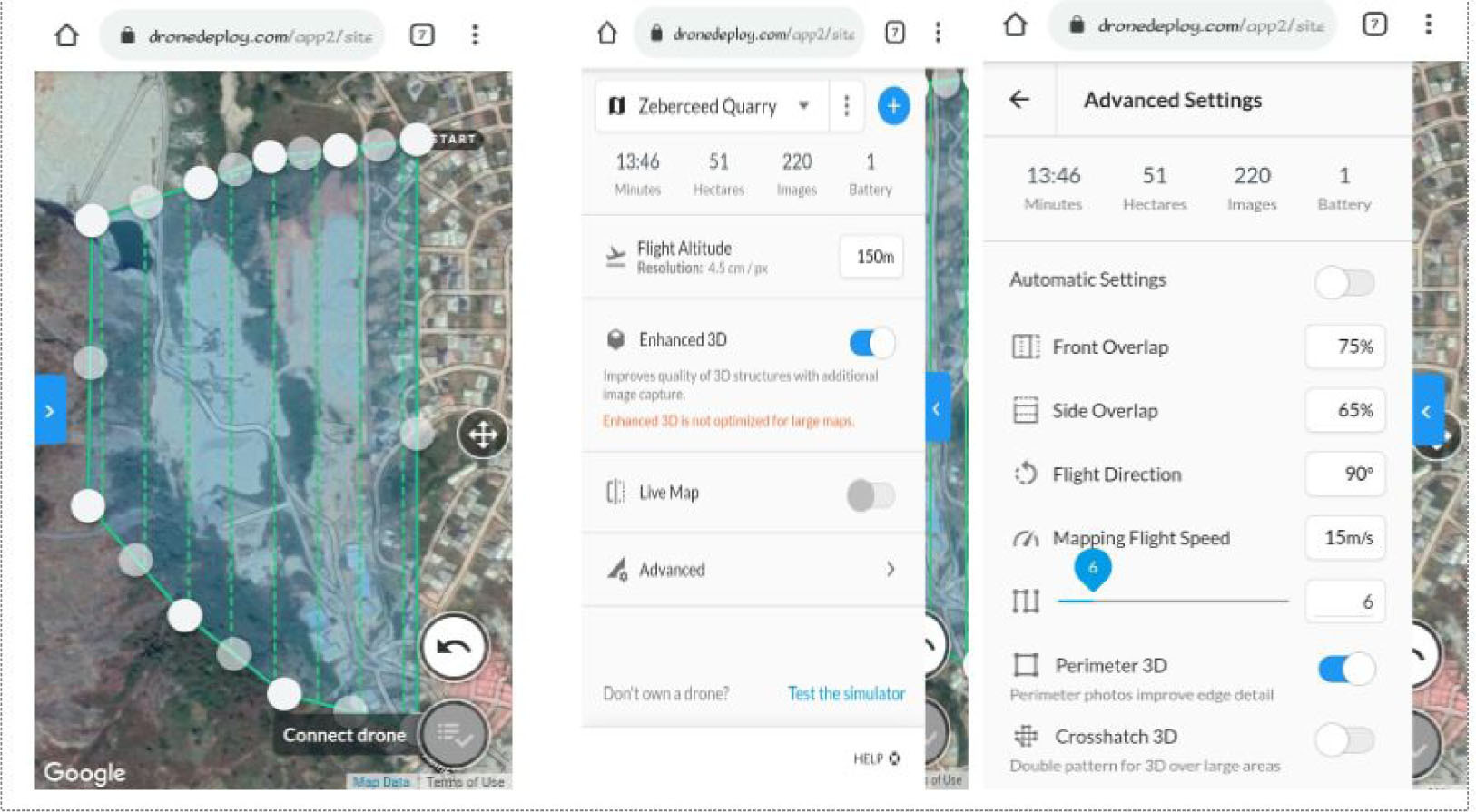
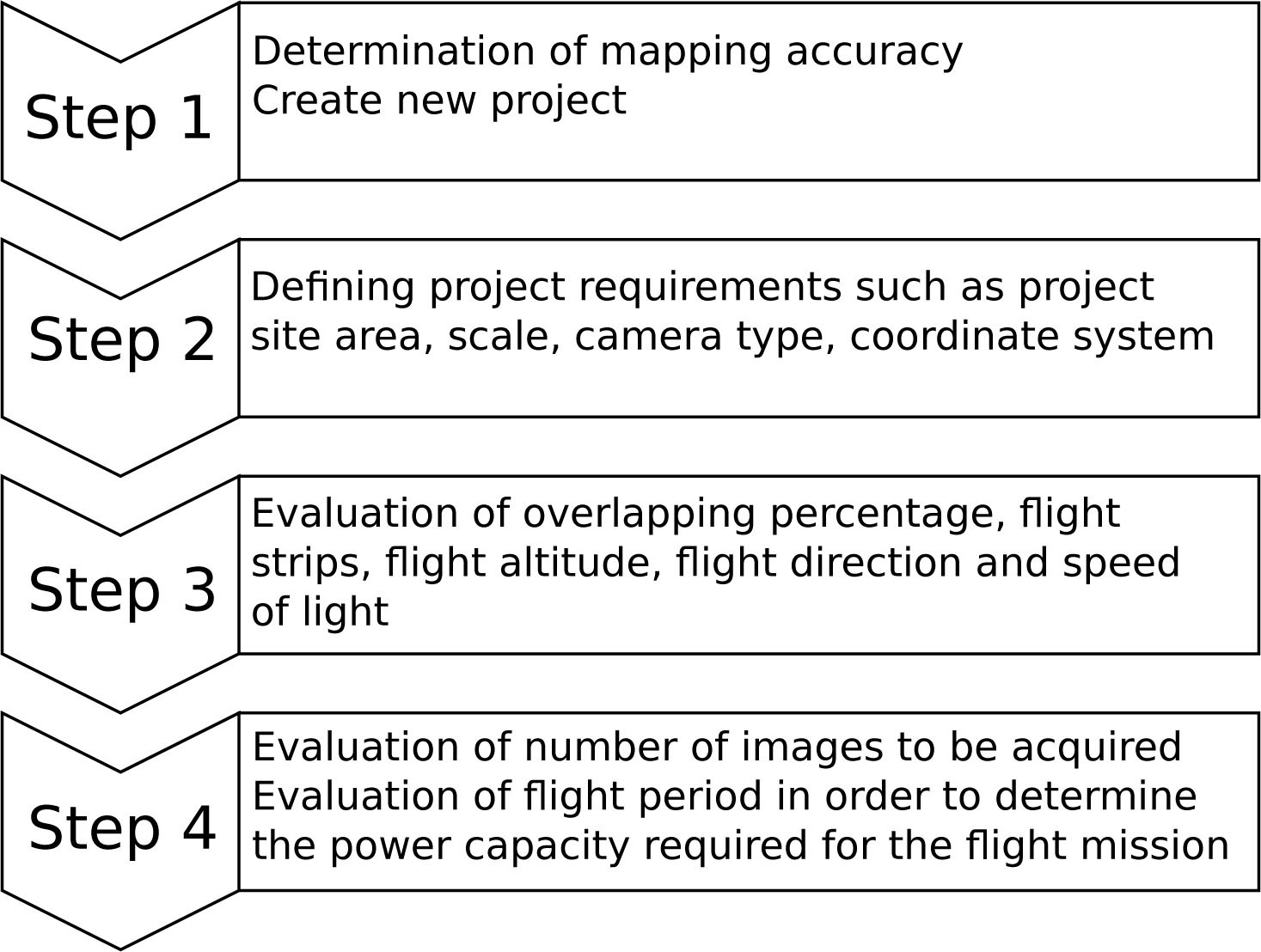
In addition, the flight plan consisted of 10 flight paths of a single grid, while the flight direction was 90° (North–South), and a flight speed of 15 m/s was adopted since the mapping required high degree of accuracy. The schematic of flight planning is presented in Figure 4.
The flight design software (Dronedeploy) used for flight planning was also used to execute the flight mission. The information obtained from the flight plan was used to autopilot the drone and a total of 200 images were acquired over the project site of about 51 ha.
The second step involved processing of the acquired overlapping aerial photographs, and Pix4Dmapper (commercially available software) was used for this processing. The choice of this software was based on some of its merits and peculiar advantages over other commercially available photogrammetric software. Abdur Rani and Rusli (2017) suggested that orthomosaic produced from Pix4Dmapper is brighter than the mosaics produced by Agisoft Photoscan, while Alidoost and Arefi (2017) argued that Pix4Dmapper and SURE produced a more appealing DSM compared to Agisoft Photoscan and 3DSurvey. Also, Pix4Dmapper has the ability to generate point cloud with a precision of 5–20 cm due to its GCP function, and it also contains built-in function to calculate the length, area and volume of selected objects (Harwin and Lucieer, 2012; Yoo et al., 2017). In addition, Pix4Dmapper boasts of a very good performance in terms of good documentation and exportation of reports, parameter controlling, user-friendliness, variety in output productions, independency, time and memory optimisation. Suziedelyte Visockiene et al. (2014) identified some of the advantages of Pix4Dmapper over PhotoMod software, and they included: automatic camera calibration, fully automated image orientation, a built-in function to upload images to Google Map using coordinates of the image centre and automatic generation of orthomosaic, among others.
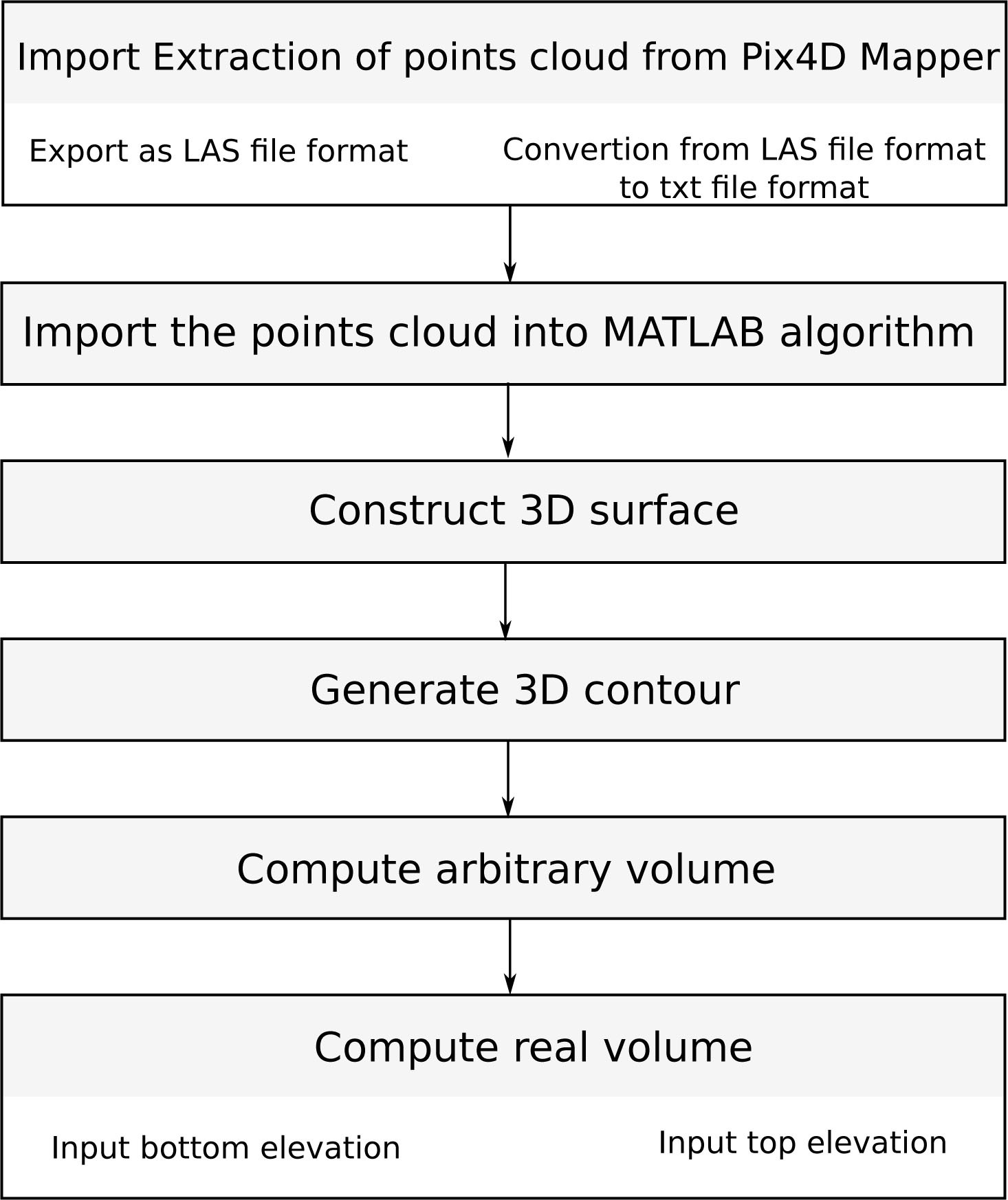
The volume of the identified stockpile was evaluated using Pix4D built-in volume estimation function. In the third step, the points cloud of the selected objects was extracted by defining the base of the stockpile through a ray cloud interface of Pix4Dmapper, and only the point of interest (stockpile) was extracted. To be able to use the exported points cloud in the developed MATLAB algorithm, the points cloud was converted from LAS file format to ‘txt’ file format, which is readable by this algorithm. This MATLAB-based automated system proposed in this research is designed to be an open-source program developed to compute volume from points cloud obtained through post-processed aerial image. It has a Graphics User Interface (GUI) with pushbuttons and edits, which makes it easy for users to interact with and perform routines without interfering with the code. Having converted the points cloud, it was imported into the developed MATLAB-based automated system through a pushbutton (upload file) on the interface. ‘Upload file’ pushbutton has the ability to open the file directory and enables user to select the desired file for 3D surface, contour and earthwork volume computation. The automated system selects only the 3D coordinates from the points cloud and interpolates the coordinates using natural neighbour interpolation algorithm. Tan and Xu (2014) described natural neighbour algorithm as an interpolation algorithm that locates the closest points of sample points to a query point and applies weight to them based on proportionate areas, in order to interpolate the values of unmeasured location. It works based on Voronoi tessellation Kuta et al. (2018). The 3D contour was generated from the interpolated values (X, Y, Z).
Finally, to estimate the volume of stockpile with this algorithm, there was a need to compute arbitrary volume, which was meant to aid in computation of the real volume. The real volume was computed using modified contour area model developed by Napoles and Berber (2018). This model calculates the volume from bottom elevation to top elevation; therefore, the user is required to input both bottom and top elevations in the provided edits on the interface. These elevations were found on the colour bar. The adopted model was coded using MATLAB, and it formed the volume computation algorithm developed and presented in this study. The methodological chart of development of this algorithm is presented in Figure 5.
. Volume estimation using Pix4Dmapper
The acquired images were processed using Pix4Dmapper v2.0.1. Image processing in Pix4D is done majorly under three stages. These are initial processing, point cloud and mesh generation, which also include the generation of DSM, orthomosaic and index map. About 20,140,865 points (with an average density of 32.18 m3) were generated. Generation of DSM is very crucial in earthwork volume computation because it illustrates the difference between the base and the terrain. PIX4Dmapper 2.0.1 has two major interpolation algorithms, which are the IDW and natural neighbour. This study adopted natural neighbour interpolation algorithm to develop DSM of the processed data. After the generation of the orthomosaic and DSM, the volume of stockpile was computed by defining the base of the desired stockpile. The base was defined through marking of points in order to create a polygon around the stockpile. Pix4D utilises a pixel-based algorithm for volume measurement. This algorithm divides the entire stockpile of well-defined base into several pixels of equal ground sample distance (GSD). The mathematical model used by Pix4D for computation of volume is presented in equation (3):
where: Vi is the volume of a cell i, GSD denotes ground sample distance (length and width) of cell i, ΔHi represents a change in elevation of cell i, HTi is a height of 3D terrain corresponding to the centre of cell i, HBi is a height of the base surface of cell i corresponding to the centre of cell i and Li and Wi are length and width of the cell i, respectively.The cut volume Vc is the volume between the base and terrain when the terrain is higher than the base. The model for cut volume is presented in equation (6):
where Vci denotes the cut volume.The fill volume V||f is the volume between the base and terrain when the terrain is lower than the base and it was computed using equation (5):
where Vf is the fill volume.The total volume of stockpile was computed through addition of both cut volume and fill volume as presented in equation (6):
where VT is the fill volume.. Volume computation with the developed MATLAB-based algorithm
The extracted points cloud which was exported in ‘xyz’ format was transformed to txt format to be used for volume calculation in the developed algorithm. A MATLAB-based user interface utility was developed using Graphics User Interface Development Environment (GUIDE), a MATLAB built-in function. The user interface (Figure 7) consists of axes (for displaying 3D terrain), pushbuttons, popup menu and edits, where the digital results of calculations are displayed. It also consists of static edits that guide users to input designated parameters. The user first imports the extracted points cloud, then inputs the value of the contour interval and the developed MATLAB-based algorithm constructs a 3D contour of the stockpile.
In order to compute the volume, the developed algorithm utilises a modified contour area method of volume estimation. Pix4D Technical Team (2019) emphasised that based on the size of the dataset, volume calculation can take a lot of computing power. That is, it requires a very good Graphics Processing Unit (GPU) driver and large amount of RAM space since the software uses a pixel-based algorithm for volume computation. For this reason, modified contour area method of volume computation was adopted for this MATLAB-based algorithm, since it requires less computing power. This method considers the volume of area above the top contour line as well as the area below the bottom contour line (Napoles and Berber, 2018). The model is expressed as in equation (7):
where V represents volume to be estimated, EAI is the size of area of interest, A1 denotes area of the first contour, C is the contour interval, EBC elevation of bottom contour, LE is the lowest elevation, An is area of the last contour line, HE represents the highest elevation in the area of interest and EHC – elevation of the highest contour line.This model requires specification of contour interval, and a contour interval of 1 is recommended for getting accurate results.
. Results and Discussion
The orthomosaic produced from the processed acquired overlapping nadir images using Pix4Dmapper is presented in Figure 6 on a scale of 1:4000, since the estimated area of the site is 51 ha, while the interface of Pix4D containing well-defined base as well as the result of the computed volume is illustrated in Figure 7, with the marked area (green) indicating the extracted points cloud.
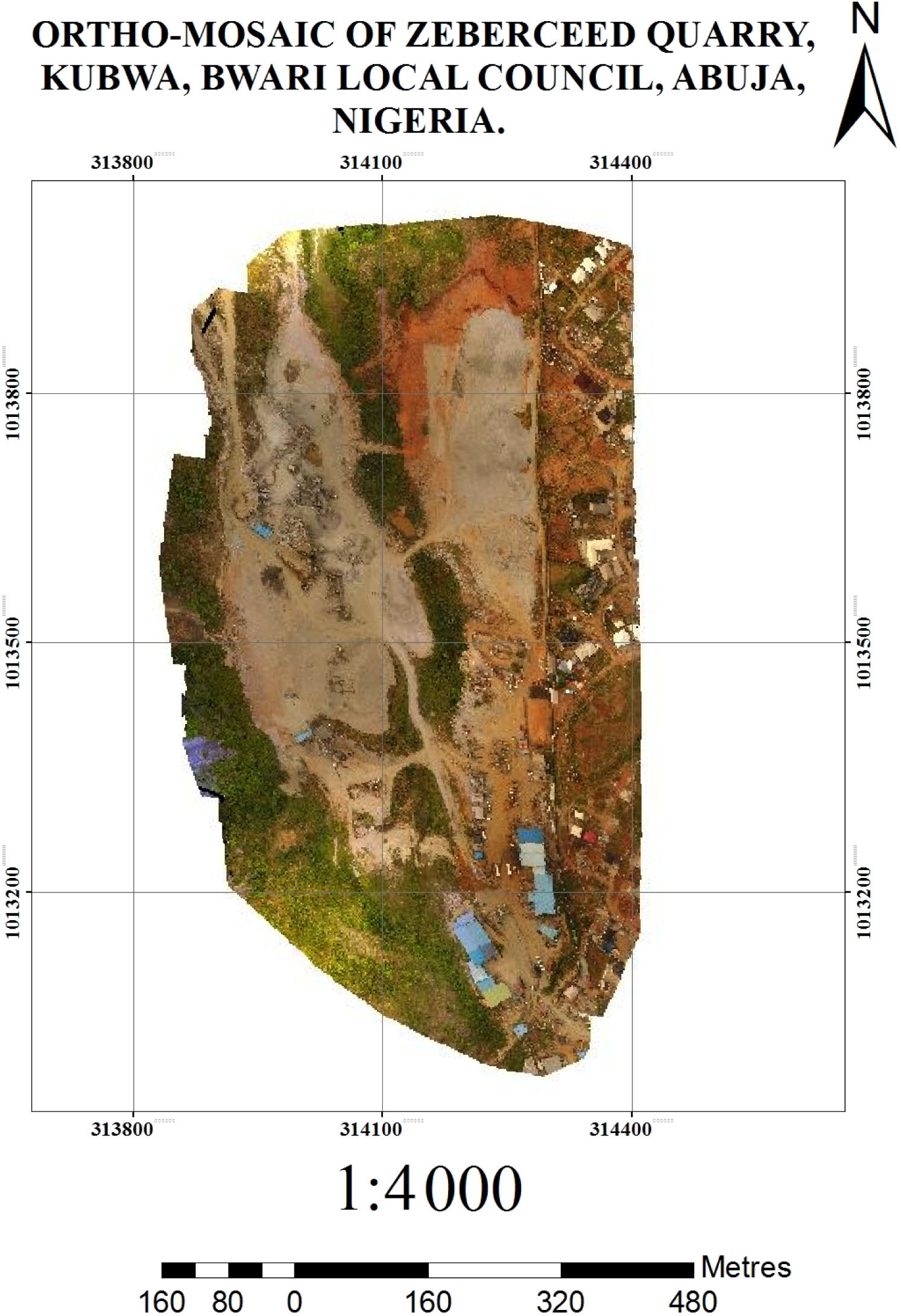
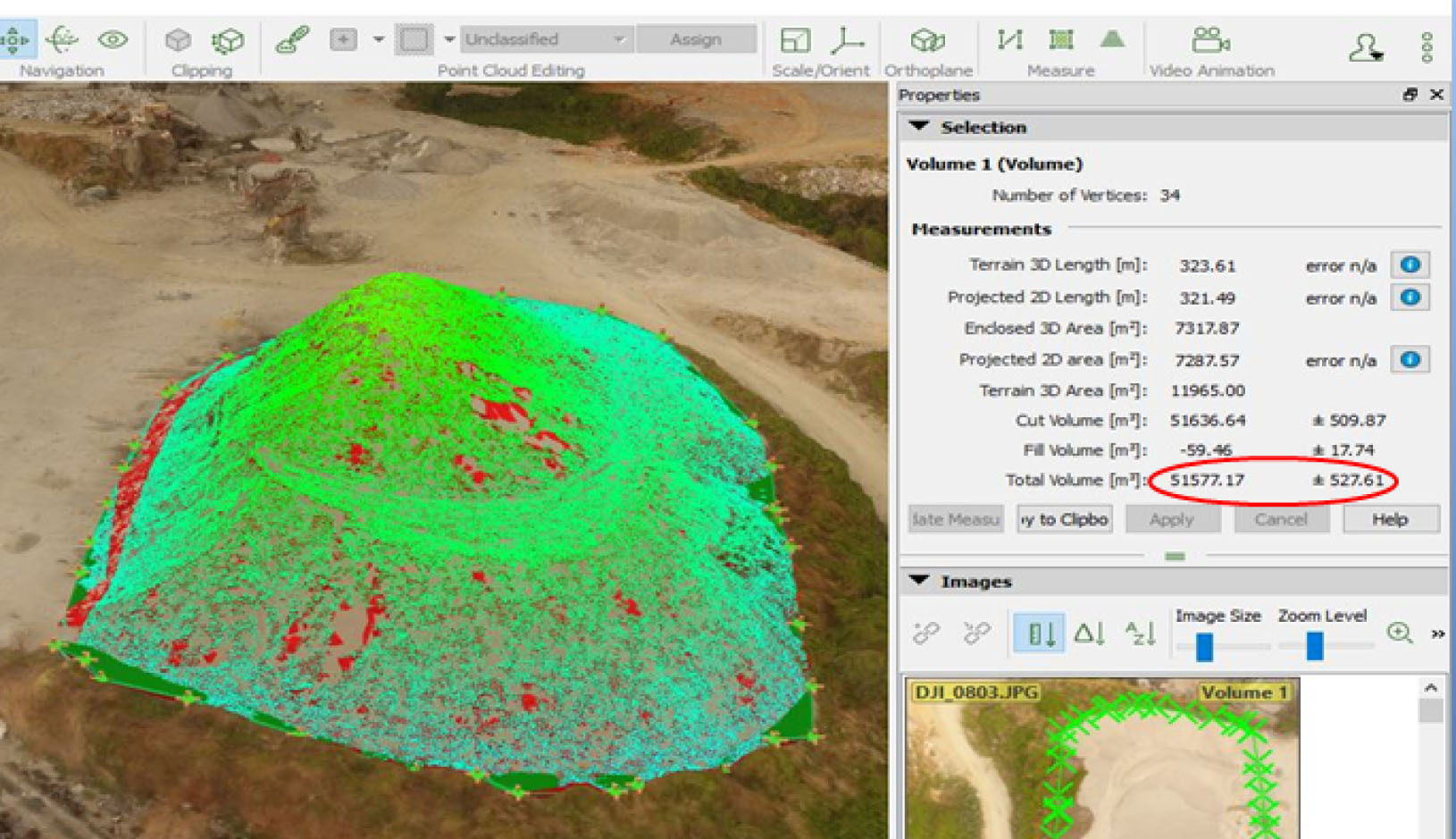
Figure 8 shows the interface of the algorithm and the major stockpile contour (3D) as well as the computed volume. The value of the evaluated volume using the developed MATLAB algorithm is 51 157.3 m3.
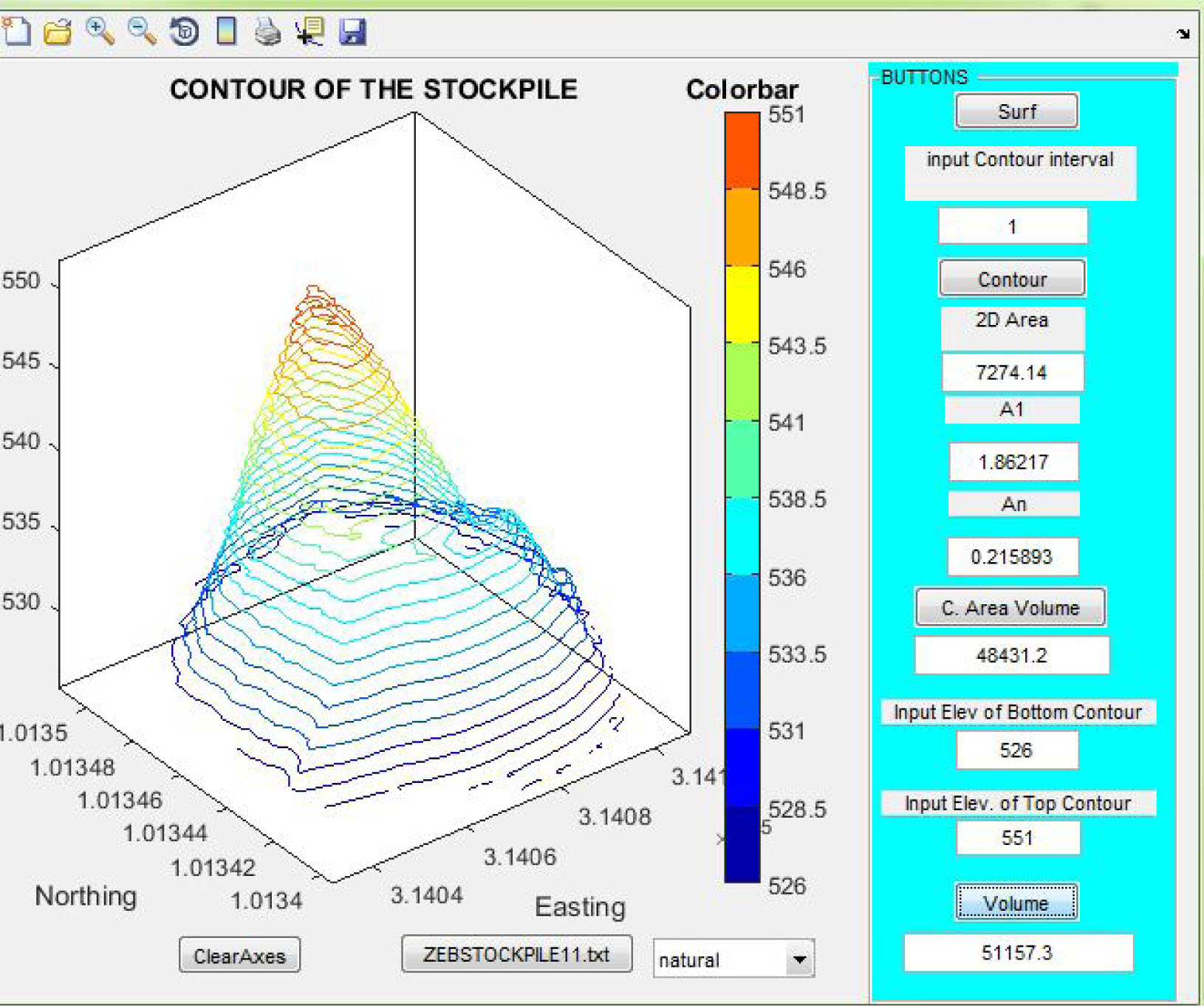
Table 2 presents the volume estimated through Pix4D and the error percentage of the estimation. The software computes the estimated volume error with respect to computed accuracy of altitude (Z) of 3D point, which is 1.5 multiplied by the GSD. The spatial resolution of GSD determines the degree of error within the volume computation. The higher the GSD, the larger the volume error. Error of volume model is expressed as equation (8):
where: Zei = 1.5·GSD and 1.5 is a constant, Ei denotes volume error, Li symbolises length of the cell, Wi – width of the cell i and Zei is error in the Z direction of cell i.Relative error of the volume can be computed using equation (9):
where %E – relative error in percentage, Ei is error of volume and V denotes total volume.The estimated volume and its error are presented in Table 2. The result of the comparison between volume estimated from Pix4D and proposed MATLAB-based system is presented in Table 3.
Table 2
Pix4D-estimated volume and error of the volume
| Pix4D-computed volume [m3] | 51 577.17 |
| Error of volume [m3] | ±527.61 |
| Relative error [%] | 1.02 |
Table 3
Estimated volumes and variation of the proposed algorithm from Pix4D
| Pix4D-computed volume [m3] | 51 577.17 |
| Proposed algorithm volume [m3] | 51 157.30 |
| Difference [m3] | ±419.87 |
| Relative error of the difference [%] | 0.81 |
The relative error of the difference in volume estimated with respect to the difference and result of Pix4D function is presented in Table 3.
Since the actual volume of the stockpile was unknown, the inbuilt volume computation function of Pix4Dmapper was used to estimate the volume. The value estimated from Pix4D was used as the ground truth value to examine measurement performance of the developed MATLAB algorithm. Raeva et al. (2016) affirmed that volume estimation precision percentage of ±3 is acceptable. Therefore, error rate of ±3% was selected as the maximum threshold for the validation of the results obtained in this study.
Relative error of 1.02% was estimated with respect to the volume of 51 577.17 m3 computed by Pix4D, while a relative error of 0.81% was obtained from the newly developed MATLAB-based volume estimation module. The comparison between the ground truth (Pix4D) and proposed algorithm indicated that the new algorithm, with a relative error of ±0.81%, outperforms Pix4Dmapper in volumetric estimations. This indicated that the difference between the result of the ground truth and the result obtained from the developed system is less than 1% (±0.81%), which is significantly below the maximum threshold of the expected error rate.
. Conclusion
This study is aimed at unlocking the utilisation of UAV-acquired images and developing new semi-automated algorithm for estimation of the volume of earthworks using MATLAB. Particularly, the study focused on the feasibility of the proposed algorithm for automatic 3D contour generation from the extracted points cloud and volume computation from the constructed contour. From the case study and experimental analysis, the Pix4Dmapper – estimated volume was used as standard or reference for validation of the results obtained from the developed semi-automated system. This is because the software's (Pix4D) estimated volume error (±1.02%) of less than ±3% is adopted as the maximum allowable error rate for this study according to the recommendation of Raeva et al. (2016). The developed algorithm presented results with error rate of ±0.81% compared to the reference (Pix4D-estimated volume). Unlike the Pix4Dmapper that yields varied or different volumes when the process is executed over and over again, even when none of the parameters are altered, the result of the developed semi-automated system does not vary when volumes are re-estimated, which increases users’ confidence level and suggests that the developed volume estimation module is more robust in terms of accuracy and precision.
